
Faire fonctionner le MeArm avec Arduino et Snap (un langage de type Scratch).
Pour commencer ce tutoriel, nous supposerons que vous disposez d'un MeArm assemblé et d'un contrôleur compatible Arduino, tel que la carte MeArm Brains. Si ce n'est pas le cas, consultez ces liens :
En plus de cela, vous aurez besoin de :
- PC ou Mac - avec accès administrateur (un Raspberry Pi fera-t-il l'affaire ? Je ne sais pas encore, je vous reviendrai là-dessus !).
- IDE Arduino ou application Codebender dans Chrome.
- Snap4Arduino - Téléchargé et installé.
- Câble USB - approprié à votre Arduino compatible.
Branchez votre Arduino via USB et ouvrez votre IDE Arduino (ou Codebender). Allez dans
Fichier > Exemples > Firmatta > Standard Firmatta
Sélectionnez votre appareil et votre port COM et téléchargez le sketch Standard Firmatta (les programmes Arduino sont appelés des sketches).
Maintenant, ouvrez Snap4Arduino. Allez dans la catégorie Arduino en haut à gauche du programme, cliquez sur Connect Arduino. Si le sketch a été téléchargé correctement et que votre Arduino est connecté via USB, il devrait maintenant être connecté !
Nous allons maintenant vous aider à démarrer en déplaçant la Pince !
Téléchargez cet exemple : MeArmClaw (Faites un clic droit et enregistrez sous)
Importez le code que vous venez de télécharger en allant sur l'icône de fichier et Importez (le fichier peut se trouver dans vos téléchargements).
Avec le MeArm connecté, vous devriez maintenant pouvoir exécuter le code en cliquant sur le drapeau vert et en appuyant sur les touches haut et bas de votre clavier pour contrôler la pince ! Si vous allez trop loin, elle bipera au lieu de bouger.
J'espère que vous pourrez voir la simplicité du code qui permet cette méthode de contrôle incroyablement rapide.
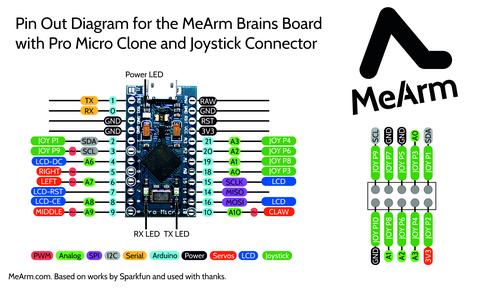
Consultez ce diagramme et voyez si vous pouvez changer le servo que vous contrôlez pour le servo du milieu...
Vous pouvez copier des blocs de code en faisant un clic droit dessus et un clic gauche sur dupliquer. En changeant la touche de contrôle, la variable que vous modifiez (griffe) et le numéro de broche du servo (ClawPin), vous pouvez contrôler tous les autres servomoteurs !
Maintenant, je vais découvrir pourquoi je ne peux pas faire de captures d'écran pour l'instant, puis je reviendrai vers vous pour ce tutoriel. J'espère que cela vous a aidé à démarrer et que vous en voulez plus ! N'hésitez pas à me faire part de vos progrès dans les commentaires ou les forums.
2 commentaires
2 great tools. Codebender & Snap4Arduino! I saw a comment on the MeArm site that you can’t run the servos from USB power. I"m running them just fine from USB (battery pack unplugged).
Hey guys, this is Vasilis, the CEO of codebender
First of all, great work! I love things that make Arduino programming easy
Just a note. codebender works with both Firefox and Chrome, and of course you can use Raspberry Pi (with Chrome/Chromium)